




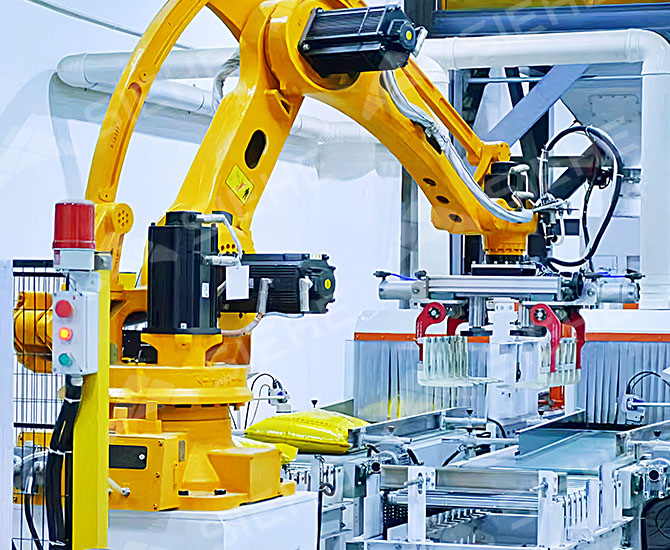
机器人码垛生产线
机器人码垛生产线主要由包装袋整形机、缓冲输送机、抓取位输送机、自动供托盘库、机械人码垛机本体、机器人夹具、安全区域防护装置、电气控制系统等装置组成,可对各种包装袋(箱)进行全自动码垛作业,具有码放速度快、垛型整齐、自动化水平高的特点;广泛适用于食品、医药、农药、化工、化肥、物流、建材、词料等行业产品物料的包装。




-
物料要求适用于袋装、箱装、盒装、桶装等规则或经整形后规则的包装物。
-
应用领域适用于食品、医药、农药、化工、化肥、物流、建材、词料等行业产品物料的包装。(更多应用领域请点击"免费咨询")
-
适用物料如大米、面粉、饲料、化肥、合成材料、水泥、腻子粉、药品等袋装、箱装或桶装物料。
产品优势
-
效率高、适用范围广
效率远高于传统码垛机和人工操作,可连续24小时不间断进行高强度码垛作业,负载大、速度快、故障率低;当产品尺寸、体积、形状及托盘规格发生变化时,只需在触摸屏上点击相应的预设程序,即可满足不同产品的码垛要求,适用性强。01
-
操作简单、自动化程度高
采用模块化智能设计,可根据不同行业和生产需求进行灵活配置和扩展;完善的安全联锁机制,对设备和操作人员提供保护;操作流程简洁直观,一人即可通过控制屏完成全部作业,自动化集成度高。02
-
占地面积小,灵活性强
集成化设计,布局紧凑灵活,占地面积小。垛型及码垛层数可任意设置,产品更新时,只需更改程序,无需改造硬件;一台机器人可同时处理多条生产线的不同产品。03
-
降本增效,改善工作环境
降低人工需求与运营成本,减少搬运过程中的产品损耗。可替代人工在恶劣环境中执行任务,有效保障人员安全,减轻劳动强度,优化工作环境。04
工作原理
包装合格的包装袋(包装箱)经输送机送到整形机,使袋形平整, 包装袋(包装箱)到达抓取位,机器人码垛机联动光感检测,检测抓取到位信号后,抓起包装袋进行转向、堆放,将包装袋(包装箱)按照预设垛型,自动进行码放,完成码垛工序。

技术参数
| 型号 | 机器人负载
(kg) |
工作半径
(mm) |
码垛高度
(mm) |
码垛速度
(pcs/min) |
重复定位精度
(mm) |
通讯方式 | IP等级 | 温度范围
(°C) |
最大功耗
(kw) |
最低厂房高度(m) |
| MD16 Max
|
16 | 1900 | 最高:2100 | <9pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 3.2 | 3.2 |
| MD20 Max
|
20 | 1900 | 最高:2100 | <9pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 3.3 | 3.2 |
| MD25 Max
|
25 | 1900 | 最高:2100 | <9pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 3.4 | 3.2 |
| MD30 Max
|
30 | 1900 | 最高:2100 | <9pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 3.5 | 3.2 |
| MD40 Max
|
40 | 1900 | 最高:2100 | <7pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 4 | 3.2 |
| MD50 Max
|
50 | 1900 | 最高:2100 | <7pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 4.5 | 3.2 |
| MD60 Max
|
60 | 1900 | 最高:2100 | <7pcs/min | ±0.04mm | TCP/IP | Ip54 | 0-55 | 5 | 3.2 |
联系方式
-
021-52913185
021-52913186
15000182099 -
021-52912822
在线提交需求/反馈
-
微信
 微信二维码
微信二维码